 Global - English
Global - English Italian - Italiano
Italian - Italiano Polish - Polski
Polish - Polski Spanish - Español
Spanish - Español French - Français
French - Français Russian - Pусский язык
Russian - Pусский язык Chinese - 中文
Chinese - 中文 Korean - 한국어
Korean - 한국어 Turkish - Türkçe
Turkish - Türkçe Vietnamese - Tiếng Việt
Vietnamese - Tiếng Việtما هي خوارزمية التحكم PID
في التطبيقات العملية للهندسة، تعد خوارزمية التحكم PID هي الخوارزمية الأكثر استخدامًا. المقطع التالي هو مقدمة محددة لما هي خوارزمية التحكم PID.
ما هو مبدأ عمل خوارزمية التحكم PID؟
يُشار إلى قانون التحكم المنظم الأكثر استخدامًا للتحكم النسبي والتكاملي والتفاضلي باسم خوارزمية التحكم PID، والمعروفة أيضًا باسم التحكم PID أو تنظيم PID. ظهرت وحدات التحكم PID بتاريخ يقارب 70 عامًا. أصبحت البنية البسيطة والاستقرار الجيد والأداء الموثوق به واحدة من تقنيات التحكم الصناعية الرئيسية. عندما لا يتم إعطاء بنية ومعلمات الكائن المتحكم فيه بالكامل، يجب الاعتماد على الخبرة والتشغيل في الموقع في بنية ومعلمات وحدة التحكم في النظام، وتطبيق تقنية التحكم PID هو التقنية الأكثر ملاءمة. بالنسبة لخوارزمية التحكم PID، هناك تحكم PI وتحكم PD. تعمل وحدة التحكم PID عن طريق حساب قيم التحكم التناسبية والتكاملية والتفاضلية.
يوجد حاليًا 3 أنواع من خوارزميات التحكم PID البسيطة نسبيًا، وهي: الخوارزمية التزايدية، وخوارزمية نوع الموضع، والخوارزمية التفاضلية. هذه الخوارزميات للتحكم هي أبسط الخوارزميات وأكثرها أساسية حيث أنها تتمتع بخصائصها الخاصة وتلبي المتطلبات العامة لمعظم أدوات التحكم.
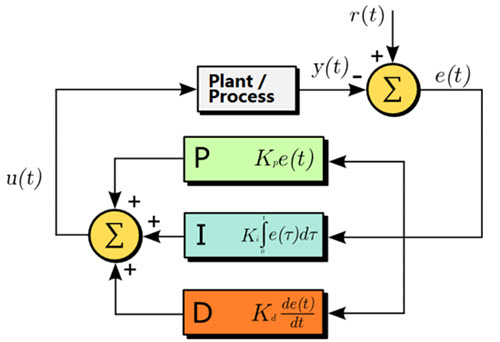
الصيغة الكاملة هي كما يلي:
u (t) = Kp * e (t) + KiSe (t) + Kd [e (t) - e (t-1)] + u0
في عملية تصحيح أخطاء خوارزمية التحكم PID، يجب أن نلاحظ الخطوات التالية:
1. إغلاق I وD، مما يعني تعيينهما على 0 وزيادة P لإنتاج التذبذبات؛
2. 3. قم بخفض P للعثور على نقطة التذبذب الحرجة؛
3. قم بزيادة I للوصول إلى القيمة المستهدفة؛
4. أعد التشغيل لمعرفة ما إذا كان تجاوز الحد الأقصى ووقت التذبذب والاستقرار متوافقين مع المتطلبات؛
5. أضف بعض المصطلحات التفاضلية بشكل مناسب لظروف تجاوز الحد الأقصى والتذبذب؛
طرق ضبط معلمات وحدة التحكم PID
يعد ضبط معلمات وحدة التحكم PID جوهر تصميم نظام التحكم في المحرك المتجه. وهناك العديد من طرق ضبط معلمات وحدة التحكم PID، ويمكن تلخيص فئتين:
1. ضبط الحساب النظري. يحدد معلمات وحدة التحكم بناءً على النموذج الرياضي والحسابات النظرية. لا يجوز استخدام البيانات المحسوبة بهذه الطريقة بشكل مباشر، ويجب تعديلها وتعديلها.
2. طريقة الضبط الهندسي، والتي تعتمد بشكل أساسي على الخبرة الهندسية للأداء بشكل مباشر في اختبار نظام التحكم والطريقة سهلة الفهم وتستخدم على نطاق واسع في الممارسة الهندسية. بالنسبة لطرق ضبط معلمات وحدة تحكم PID، هناك طريقة النسبة الحرجة وطريقة منحنى الاستجابة وطريقة الاضمحلال.
تتميز الطرق بخصائصها الخاصة حيث يتم اختبارها جميعًا أولاً ثم تكون هناك صيغة تجريبية هندسية لتنفيذ الضبط على معلمات وحدة التحكم. في الوقت الحاضر، يتم استخدام نظام التحكم PID على نطاق واسع في أتمتة PLC ومحركات التردد المتغير، في حين أن الطريقة الأكثر استخدامًا هي طريقة النسبة الحرجة.
إذا كنت بحاجة إلى معرفة المزيد من المعلومات حول نظام التحكم PID ومبدأ عمله، فلا تتردد في الاتصال بنا وسوف يقوم الدعم الفني لدينا بالرد عليك قريبًا.